日立建機株式会社様
建設機械の遠隔操縦システムのプロトタイプ構築
intdash導入により制御データ、車体データを低遅延で伝送可能な遠隔操縦システムを実現

プロジェクト概要
日立建機株式会社様(以下、日立建機)では建設現場の生産性向上、安全性向上のために建設機械の自動運転、遠隔操縦の実現に向けた研究開発を行っています。日立建機とアプトポッドとの取り組みにおいて、アプトポッドが提供する高速IoTプラットフォーム「 intdash 」を採用頂き、2020年度に建設機械向けの遠隔操縦システムのプロトタイプを構築しました。
プロジェクトの背景
建設業においては、生産労働人口の減少や熟練技能者の高齢化が課題となっています。その解決策のひとつとして、遠隔操作による作業に期待が寄せられています。この実現のために、intdashを採用頂き、低遅延のデータ伝送による建設機械の遠隔操縦システムのプロトタイプを開発しました。
遠隔操縦は、遠隔にいる操作者が建設機械に取り付けられたカメラの映像を見ながら、コントローラを使用して、建設機械を操作するため、映像と操作に遅延が起きないことが求められ、intdashの持つ「データ伝送の低遅延性」という特長を活かして、リアルタイムにデータ伝送が可能な遠隔操縦システムを実現しています。
プロジェクトのシステム概要
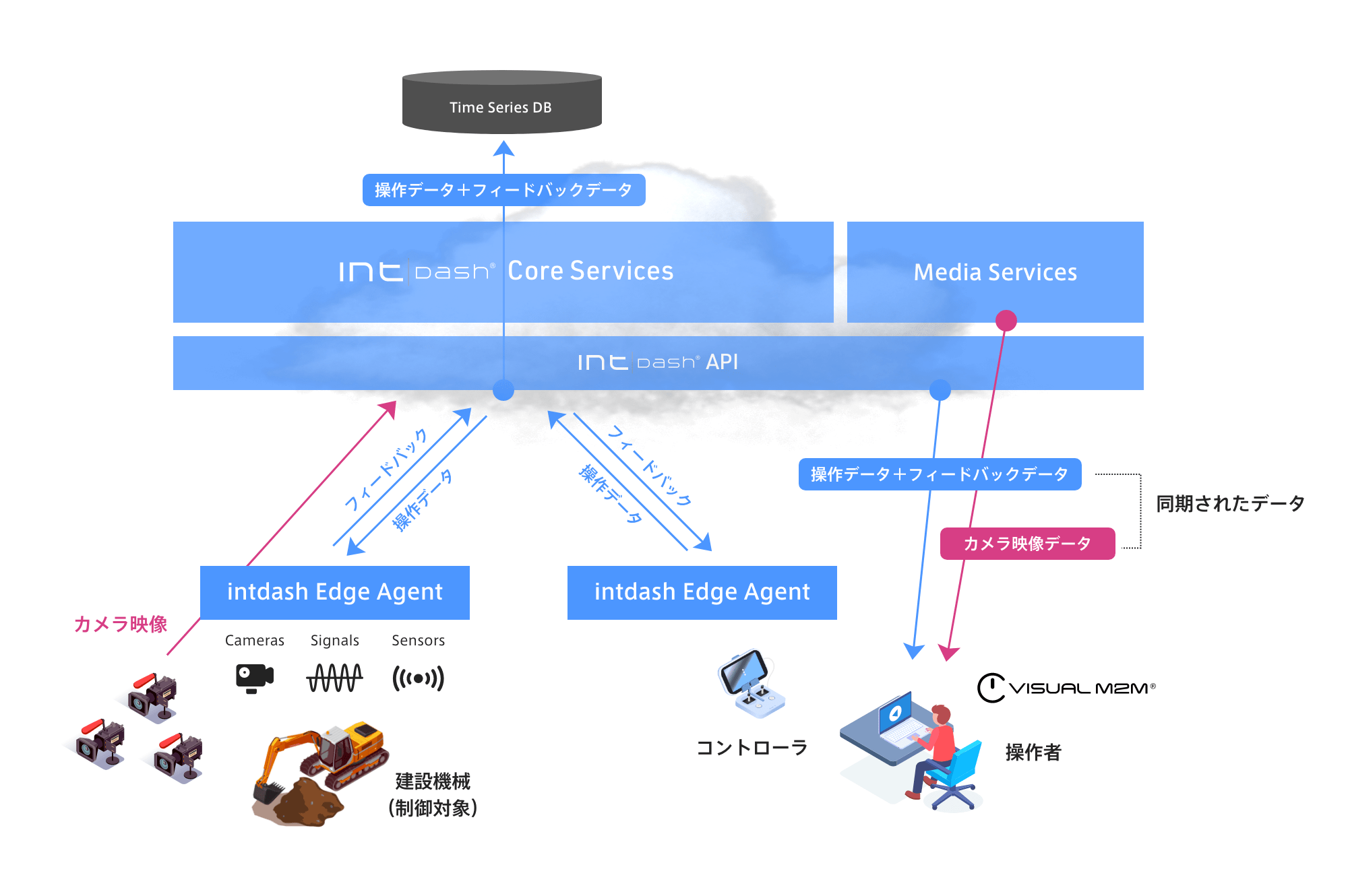
本システムでは建設機械を遠隔操縦するために、操作者側、建設機械側にそれぞれアプトポッドが提供するエッジコンピュータを設置し、エッジコンピュータがintdashサーバに接続してデータ伝送を行うことで、エッジコンピュータ間で低遅延なデータ送受信を実現します。また、アプトポッドが提供するWEBベースのダッシュボードアプリケーションである「 Visual M2M Data Visualizer 」を使用して、エッジコンピュータ間で伝送されるデータをリアルタイムに可視化が行えます。
送受信するデータは、操作者の操作情報、建設機械の車体情報、建設機械に設置したカメラ映像であり、操作者は建設機械から送信される車体情報、カメラ映像をリアルタイムに確認しながらコントローラを使用して建設機械の遠隔操縦を行うことができます。
【システム概要図】
遠隔操作デモンストレーション動画
今後の展望
日立建機は、人と機械が協調して働く現場をめざし、人と機械、機械と機械、機械と施工現場環境とが相互に情報をやり取りすることで、施工現場全体の安全性の向上、生産性の向上を実現する取り組みを続けています。アプトポッドは人、機械、施工現場環境の相互の情報のやり取りのために、データ伝送プラットフォームintdashをより進化させていき、本プロジェクトの更なる発展と適用先の拡大に貢献してまいります。