intdash
CONTROL
CENTER
モビリティ/ロボット群管理・遠隔制御
RobOps/ マルチロボット群管理
ロボットの開発からマルチロボット運用までサポートするRobOps機能の強化
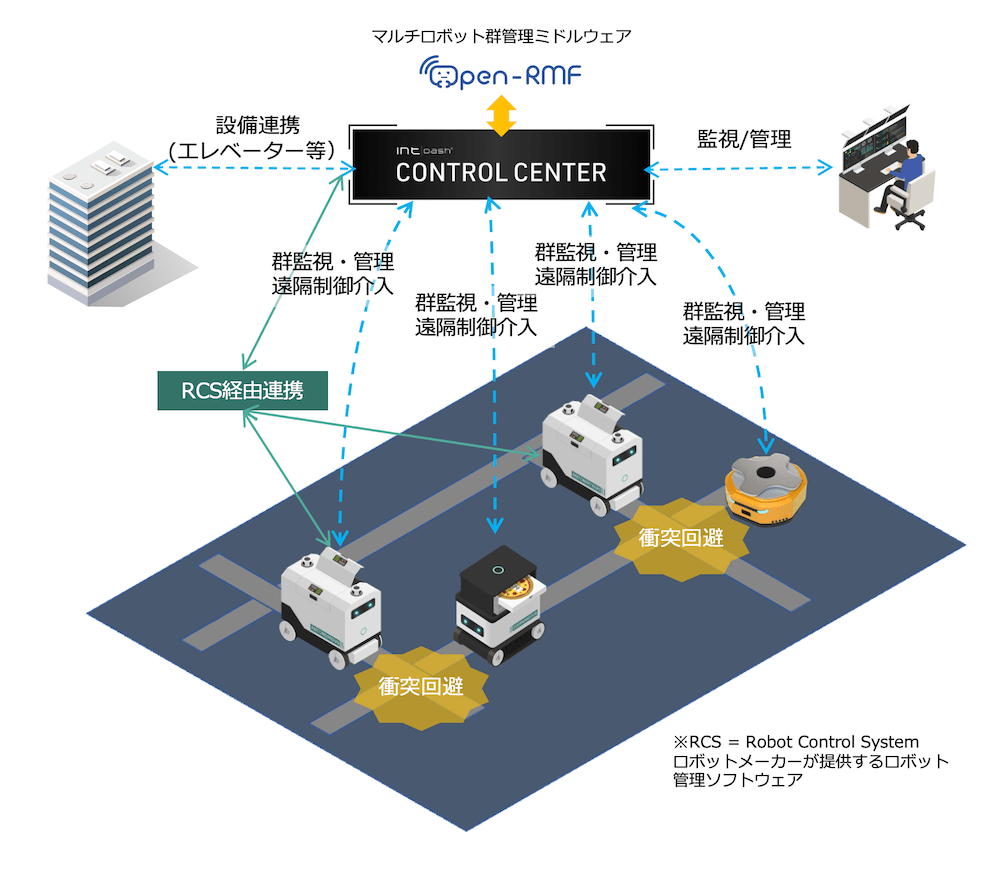
搬送、警備、検査など、商業施設、倉庫、プラントなどの施設内で導入が進む自律ロボットの種類は多岐にわたり、同一フィールドをマルチベンダのロボットが稼働します。こうしたマルチロボットの運用においては、衝突回避やルート・タスク管理など、マルチベンダのロボットを統合管理できる環境が必要となっています。 intdash CONTROL CENTERではマルチロボットの群管理ミドルウェアである『Open-RMF』との連携により、同一フィールド内で稼働するマルチロボットのリアルタイムな群管理を実現します。
求められる要件
- 様々なメーカーのロボットの一元的な群管理
- ルート管理、タスク管理
- 衝突回避などの群管制
- リアルタイムなモニタリング
- 緊急時のロボットへの遠隔制御介入
intdash CONTROL CENTERの実現
- 個別機体のリアルタイムモニタリング
- 機体情報、位置情報、映像情報など
- トラブル時のデータ解析
- マルチロボット群管理
- 遠隔制御介入
- 様々な種類の自動化機体への遠隔制御
- エレベータ・自動ドアなどとロボットの連携
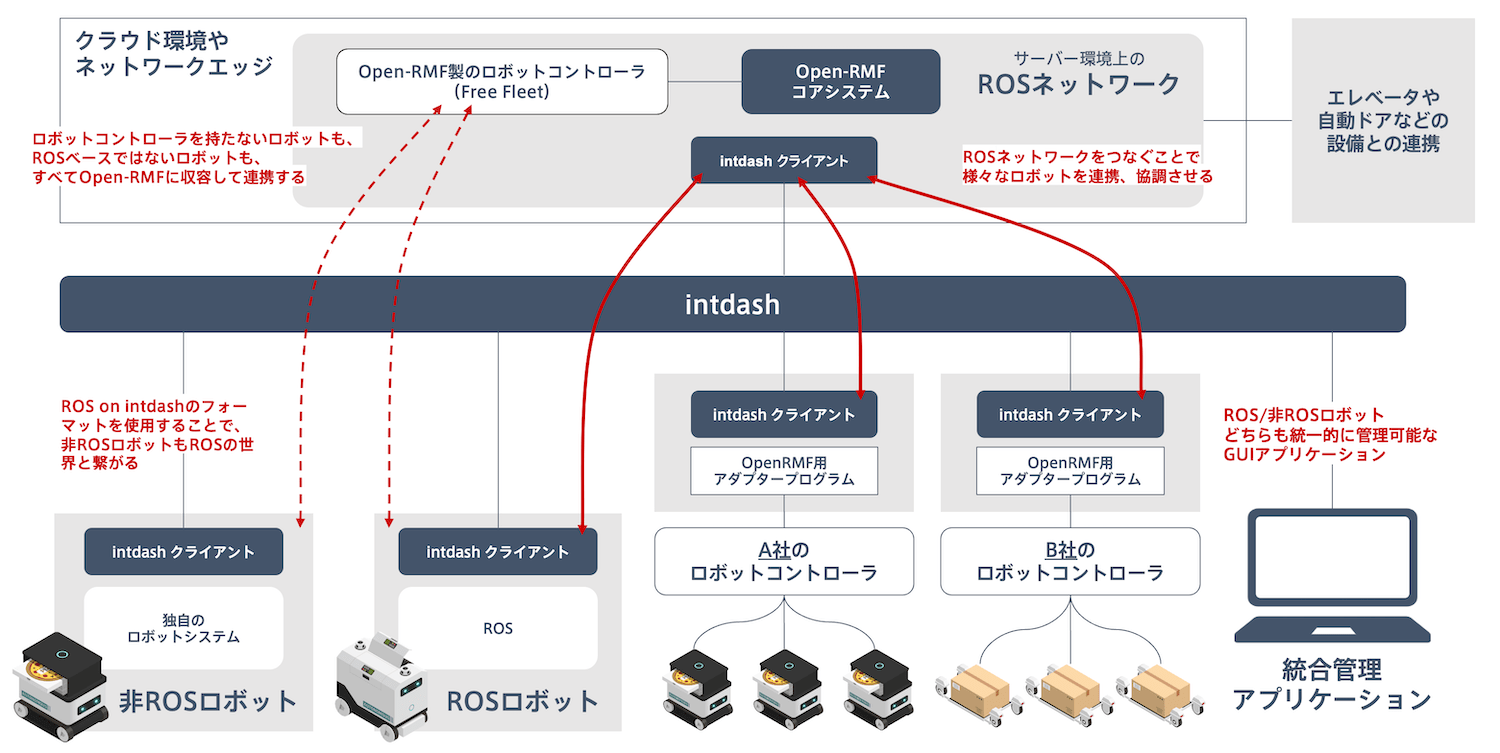
ROS、非ROSのロボット対応
intdash CONTROL CENTERではROS1/2及び非ROSロボットにおけるデータストリーミングへのサポートに加え、マルチロボットの群管理フレームワーク『Open-RMF』に対応し、マルチロボットの運用に必要な群管理機能の提供を可能にしました。
Open-RMFとの連携によるマルチロボット群管理
Open-RMFとの連携により、マルチロボットのルート設定、タスク管理、及び競合回避といった、マルチロボットの群管理に欠かせない機能を提供します。
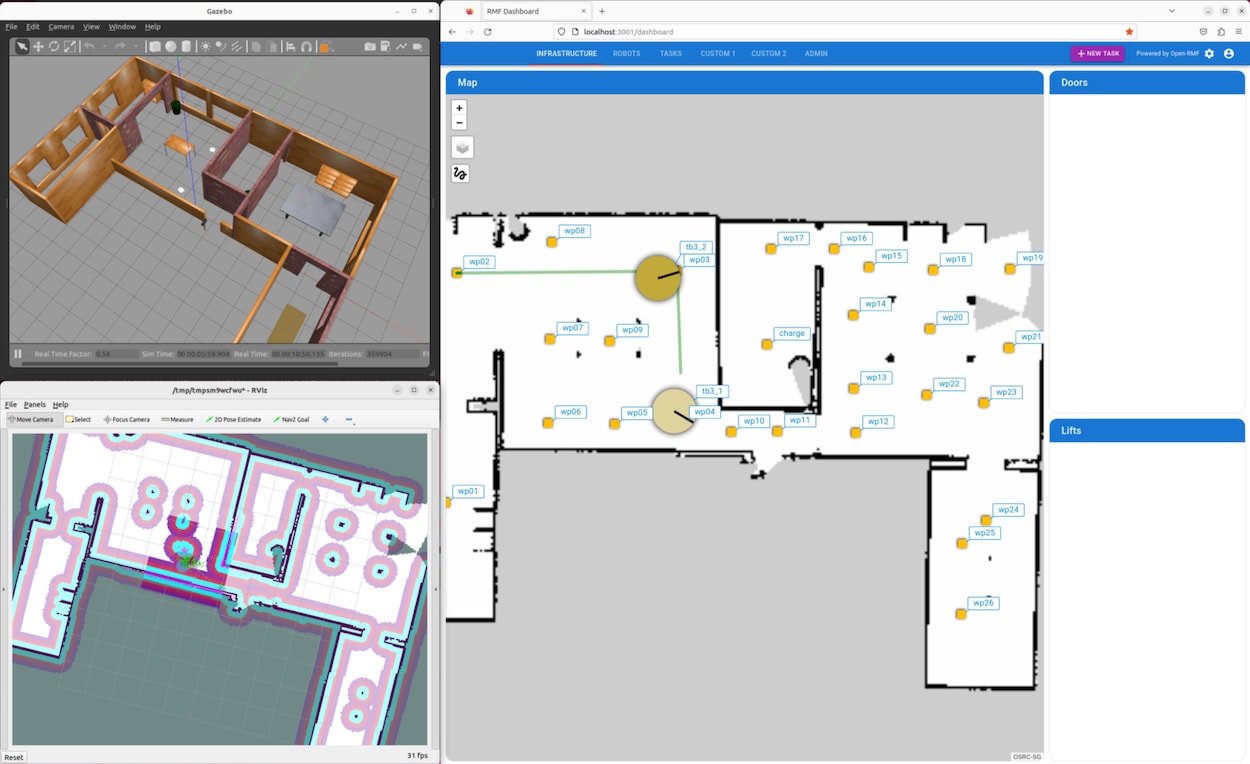
ROS周辺ツールとの連携
シミュレーション環境であるGazeboや可視化環境である Rvizなどとの連携によるデジタルツイン環境により、実機とバーチャル空間をintdash CONTROL CENTERで統合し、ロボット開発と運用におけるアジャイルなPDCAを実現します。
ロボット開発の支援
ROSトピックや映像データなど、ロボットから発せられるデータをサーバー/クラウドで一元管理し、データレビューやアルゴリズム開発などにおけるデータ活用が可能です。
OTAによるロボットの更新
intdash CONTROL CENTERのOTA機能によりロボットアプリケーション(ROSモジュールなど)のリモートでのデプロイが可能です。
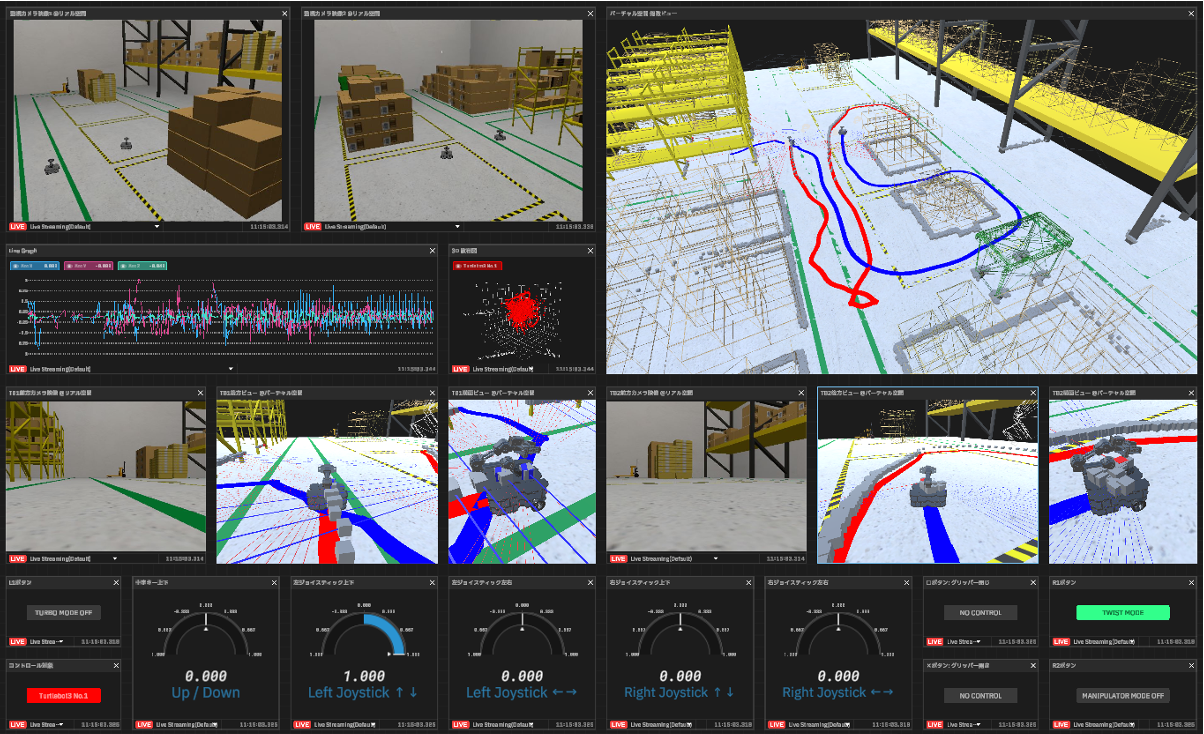
Webベースのデータ可視化ダッシュボード『Visual M2M Data Visualizer』
Visual M2M Data Visualizer は、機体ごとの詳細データのリアルタイムなモニタリングを実現し、及びログデータの閲覧と解析作業をサポートします。 ユーザー自身がノンプログラミングで自由な画面構成を作成できます。
リアルタイムデジタルツイン環境の実現
Unityアプリケーション向けSDKにより、バーチャルな3D空間に実空間のリアルタイムデータを反映した、高度なデジタルツインを実現できます。これにより、映像だけでなく、LiDARの点群データの空間表現を可能とし、測距ベースの精密な遠隔制御やリアルタイムな現状把握を可能とするアプリケーション開発が可能となります。
ロボットメーカー向けの開発者支援プログラムの提供 (近日公開)
CONTROL CENTERを活用した遠隔システム開発を検討するロボット開発者向けに、技術情報の提供とテスト環境の無償提供を行います。
当ソリューションに関するお問い合わせはこちら
豊富な実績と高い技術力で、お客様の課題解決にご協力いたします。まずはお気軽にご相談ください。
お問い合わせフォーム